Analysis Tutorial 1: Basic Analysis and Templates 1
This tutorial showcases some of the basic functionality of EMDtool, including
* Creating a motor model from templates * Running time-static analysis and post-processing basic results
Contents
Setting dimensions
First, let us set the dimensions required. For simplicity, we begin by initializing an empty structure.
Finally, let us initialize a timer to see how long stuff actually takes:
tic;
addpath(genpath('../EMDtool'));
dim = struct();
Next, let's set some general dimensions and specs.
%general dimensions dim.p = 10; %number of pole-paits dim.Qs = 24; %number of stator slots dim.delta = 1e-3; %total effective airgap dim.leff = 70e-3; %core length dim.temperature_rotor = 100; dim.temperature_stator = 120;
Then, let us define our winding.
%winding parameters
winding = ConcentratedWindingSpec(dim);
winding.N_layers = 2;
winding.filling_factor = 0.5;
winding.N_series = 12;
dim.stator_winding = winding;
dim.symmetry_sectors = dim.stator_winding.symmetry_period();
Furthermore, let us set some general dimensions. These help the templates to determine whether we are making an inrunner or an outrunner motor.
dim.Rout = 50e-3; %airgap-side radius of rotor dim.Sin = dim.Rout - dim.delta; %airgap-side radius of stator dim.Sout = 28e-3; %frame-side radius of stator
Finally, let's specify the materials used. For the default materials available, check out here.
dim.magnet_material = 14; %Magnet material dim.rotor_core_material = 4; %rotor iron material dim.stator_core_material = 4; %stator core material dim.stator_wedge_material = 0; %air; no wedge
Creating rotor geometry.
Now, let's set some more dimensions.
%rotor dimensions dim.hyr = 5e-3; %rotor yoke thickness dim.h_sleeve = 0e-3; %no retaining sleeve for PMs dim.hpm = 3e-3; %PM thickness dim.alpha_pm = 0.8; %PM pitch, relative to pole pitch dim.is_halbach = false; %no Halbach array
...and create and plot the geometry:
rotor = SPM1(dim); figure(1); clf; hold on; box on; axis equal; rotor.plot_geometry(); snapnow;
Creating stator geometry.
Next, let's do the same for the stator. There are oly a few more dimensions to set.
%stator dimensions dim.htt_s = 1e-3; %tooth tip height dim.htt_taper_s = 0.5e-3; dim.hslot_s = 14e-3; %total slot depth, airgap to bottom dim.wtooth_s = 5e-3; %tooth width dim.wso_s = 2e-3; %slot opening width dim.r_slotbottom_s = 1e-3; %slot bottom fillet radius dim.stator_stacking_factor = 0.99;
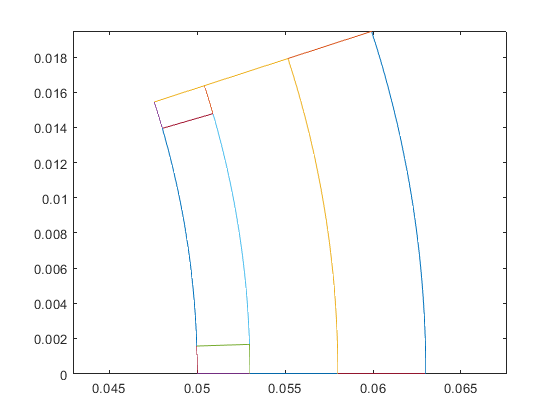
Create the geometry, and plot it.
stator = Stator(dim); figure(1); stator.plot_geometry(); snapnow;
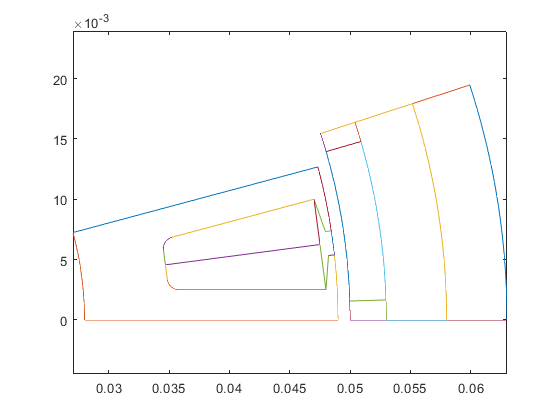
Meshing the geometry
Pretty self-evident, huh?
stator.mesh_geometry(); rotor.mesh_geometry(); figure(2); clf; hold on; box on; axis equal; stator.visualize('linestyle', '-'); rotor.visualize(); snapnow; toc
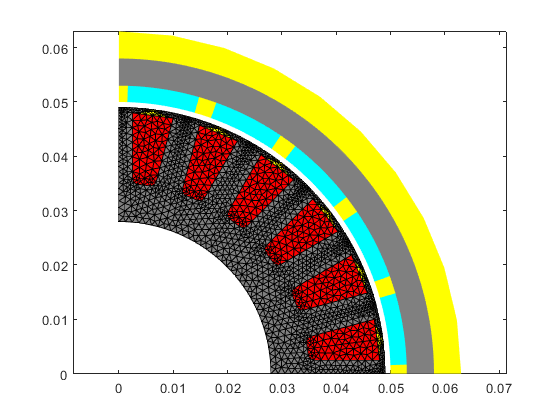
Elapsed time is 2.129119 seconds.
Creating a Model
Now, we create a model, an object for encapsulating all the relevant components, aspects, and behaviour of our design. Since we are dealing with a rather standard radial-flux motor, the base class RFmodel will do.
tic; motor = RFmodel(dim, stator, rotor);
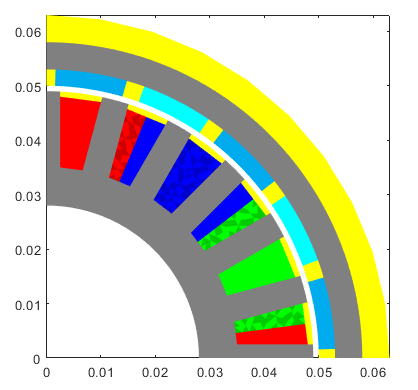
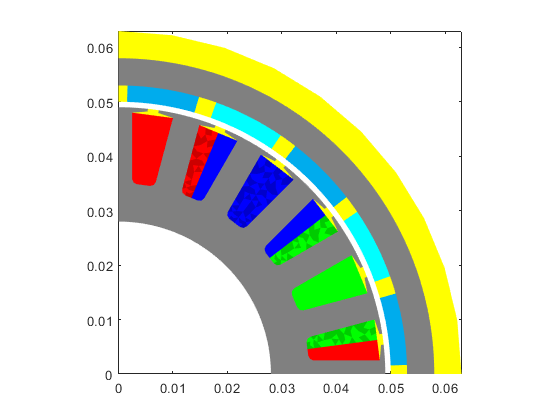
For reasons, let's also visualize the model to see e.g. the winding layout highlighted with different colours.
figure(2); clf; hold on; box on; axis equal; motor.visualize(); snapnow;
Let's also create a MagneticsProblem object for representing the problem we're analysing.
problem = MagneticsProblem(motor); toc;
Elapsed time is 0.377287 seconds.
Setting supply
For now, we're going to be using a current supply model, meaning we're not taking induced voltages etc. into account.
Let's run a sweep of load angles from 0 to 180 degrees, to compute a rough torque curve. First, create an array for the load angles
tic;
load_angles = linspace(0, pi, 21); %load angles to analyse
Then, do an inverse Park-Clarke transformation to get the instantaneous phase currents from the dq-components:
Is = xy(80*[cos(load_angles); sin(load_angles)], problem)
Is = Columns 1 through 7 77.2741 73.0836 67.0936 59.4516 50.3456 40.0000 28.6694 -20.7055 -8.3623 4.1869 16.6329 28.6694 40.0000 50.3456 -56.5685 -64.7214 -71.2805 -76.0845 -79.0151 -80.0000 -79.0151 Columns 8 through 14 16.6329 4.1869 -8.3623 -20.7055 -32.5389 -43.5711 -53.5304 59.4516 67.0936 73.0836 77.2741 79.5618 79.8904 78.2518 -76.0845 -71.2805 -64.7214 -56.5685 -47.0228 -36.3192 -24.7214 Columns 15 through 21 -62.1717 -69.2820 -74.6864 -78.2518 -79.8904 -79.5618 -77.2741 74.6864 69.2820 62.1717 53.5304 43.5711 32.5389 20.7055 -12.5148 0.0000 12.5148 24.7214 36.3192 47.0228 56.5685
Set the current array as source current...
C = motor.circuits.get('Phase winding'); C.set_source('uniform coil current', Is);
Running analysis
...and solve a series of static problems.
pars = SimulationParameters('rotorAngle', 0*load_angles/dim.p, 'silent', true); solution = problem.solve_static(pars);
Plotting results
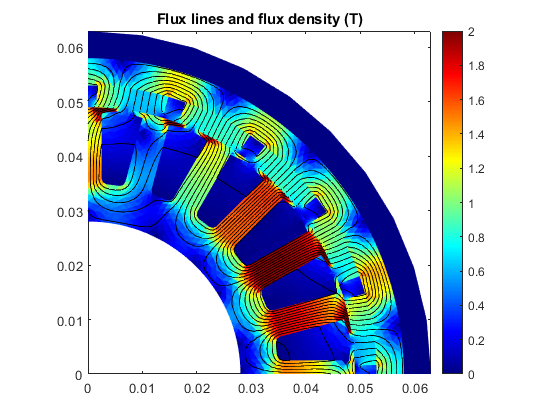
Finally, plot the torque curve and the flux density at peak torque.
T = motor.compute_torque(solution); figure(6); clf; hold on; box on; grid on; plot(load_angles/pi*180, T); xlabel('Angle (deg)'); ylabel('Torque (Nm)'); snapnow toc figure(7); clf; hold on; box on; motor.plot_flux( solution, 11);
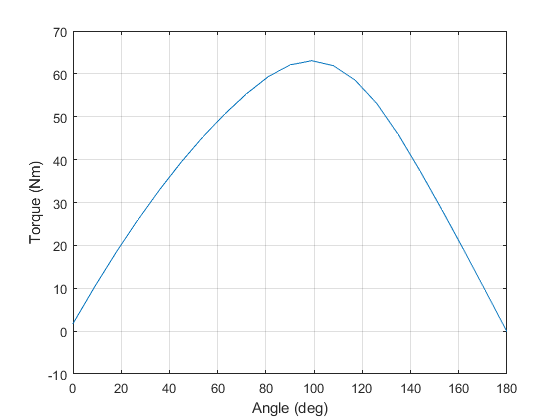
Elapsed time is 1.751505 seconds.